Што е Лидар (ЛиДАР)? Lidar ги комбинира можностите за опсег на радар со аголна резолуција на камерата за да обезбеди прецизно сензорирање со свесност за длабочина за да се комплетира сликата (слика 1).

Слика 1: Камерите, радарот и лидарот се трите изборни технологии за автономно возење. (Кредит на слика: ADI)
Визуелниот дел ја претставува видливоста на камерата или возачот, класификацијата на објектите и страничната резолуција. Темнината и временските услови како снег, прашина или дожд може да ги нарушат овие способности. Радарскиот дел го претставува враќањето на RF сигналот. Овој сигнал е имун на временските услови и темнината, а исто така го мери растојанието. Лидарскиот дел може да ја комплетира сликата со сензори со обезбедување дополнителна класификација на објекти, странична резолуција, опсег и темна пенетрација.
Како работи лидар?
Основните елементи на лидарскиот систем вклучуваат систем за предавател на квадратни бранови, целна средина и систем за оптички приемник што се користи за интерпретација на растојанијата до надворешните елементи во околината. Методот на сензори на лидар користи светлина во форма на импулсен ласер за мерење на опсегот со анализа на времето на летот (ToF) на вратениот сигнал (Слика 2).
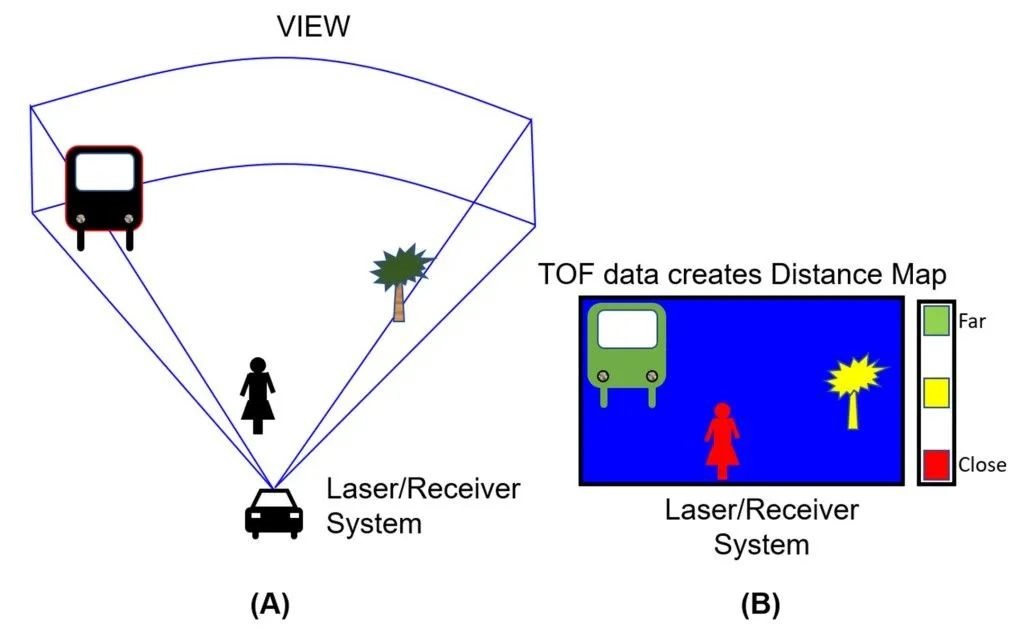
Слика 2: Секоја преносна единица на лидар има триаголно „гледно поле“. (Кредит на слика: Бони Бејкер)
Цртежот на растојанието зависи од оптичкиот дигитален сигнал.
Сигнали во дигиталниот домен
Решението на колото на lidar е да го реши проблемот со приемот на сигналот преку автомобилски трансимпедантен засилувач. Влезната фаза се користи за прифаќање пулсирања на негативни влезна струја од фотодетекторот (слика 3).

Слика 3: Електронскиот дел на лидарот се состои од ласерски диоден предавател и два фотодиодни приемници. (Кредит на слика: Бони Бејкер)
Ласерските диоди пренесуваат дигитални импулси преку парче стакло. Овој сигнал се рефлектира и на фотодиодата D2. Обработката на овој сигнал обезбедува време на транзит и електронско доцнење вградено во системот.
Импулсите на дигиталниот светлосен сигнал го погодуваат објектот и се рефлектираат назад кон оптичкиот систем. Повратниот пулс се пресликува на втората фотодиода D1. Електронскиот дел од патеката на сигналот D1 е ист како патеката на сигналот D2. Времето на летот може да се пресмета откако двата сигнали ќе стигнат до микроконтролерот (MCU).
Слика од пазарот
Автомобилските лидарски системи користат импулсна ласерска светлина за мерење на растојанието помеѓу две возила. Автомобилските системи користат лидар за контрола на брзината на возилото и системите за сопирање како одговор на ненадејните промени во сообраќајните услови. Lidar игра важна улога во полуавтоматските функции за помош на автомобилот, како што се системите за предупредување и избегнување судир, помош за задржување лента, предупредување за напуштање лента, монитори за слепите точки и адаптивна контрола на патувањето. Автомобилскиот лидар ги заменува радарските системи во претходните системи за автоматизација на возилата. Системите Лидар може да се движат од неколку метри до над 1.000 метри.
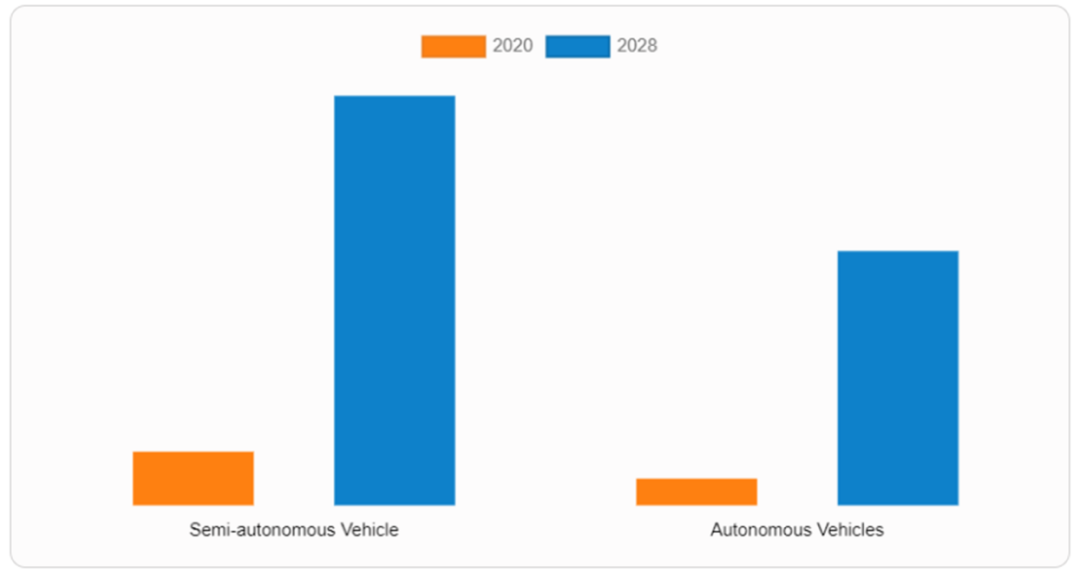
Слика 4: Пазарот на автомобилски лидар е сегментиран на полуавтономни и целосно автономни апликации за возила. (Извор на слика: Сојузничко истражување на пазарот)
Самоуправувачките автомобили се веќе во широка употреба, а системите за сликање со лидар дополнително ќе ја подобрат ситуацијата. Радарот, камерите и лидарската опрема сè уште се технологии на избор за полуавтономно и целосно автономно возење, а цената на лидарот паѓа, а пазарот ја забрзува оваа промена.
Авторски права @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - Кина модули за оптички влакна, производители на ласери поврзани со влакна, добавувачи на ласерски компоненти Сите права се задржани.